I built this mini Natbus with two team members as part of the Capstone project for the IEEE OPS program. Our goal was to construct an autonomous car that can negotiate a preset course in the shortest time possible. The course is marked by a 1-inch wide blue tape on a dark background. We did not know the path of the course before the attempt.
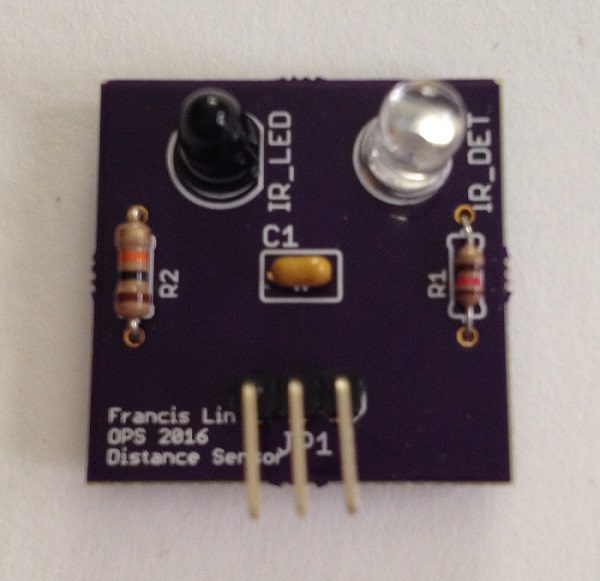
Our first step was to design two distance sensors, which I used to measure the car’s deviation from the designated path. I designed a PCB with an IR LED and IR sensor on EAGLE software. The design was then sent to OSH Park for fabrication. I assembled the two sensors after I received the PCB’s a couple days later.
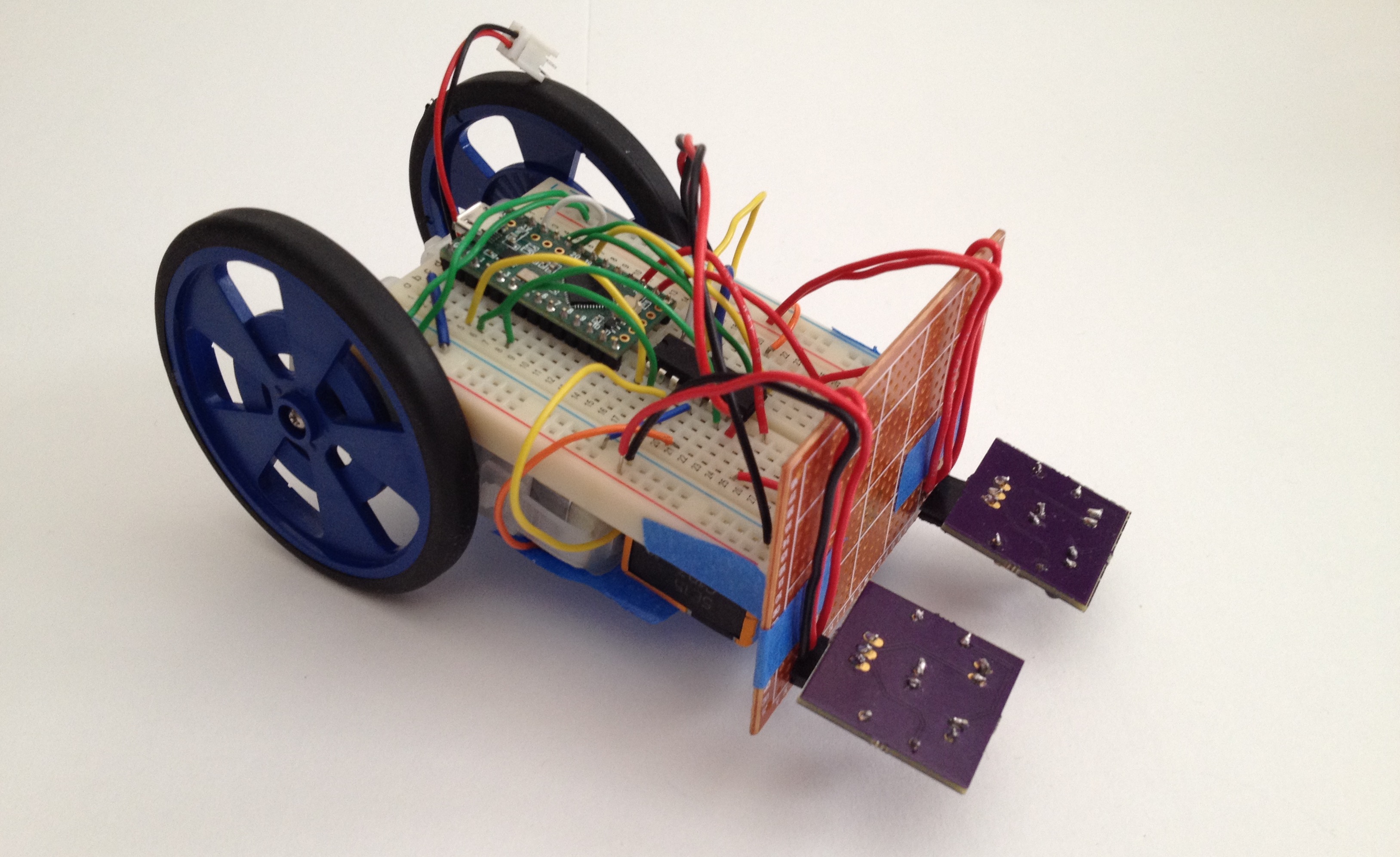
The circuit of the Natbus was assembled on a breadboard, and was connected to two motors with 90-degree gearboxes. The motors were powered by a 9V battery and controlled by an H-Bridge IC, specifically the L293D H-Bridge. To facilitate motion, two large drive wheels and one ball bearing was used. The information collected by the distance sensors was processed by the Teensy-LC microcontroller, which regulated how the motors moved.
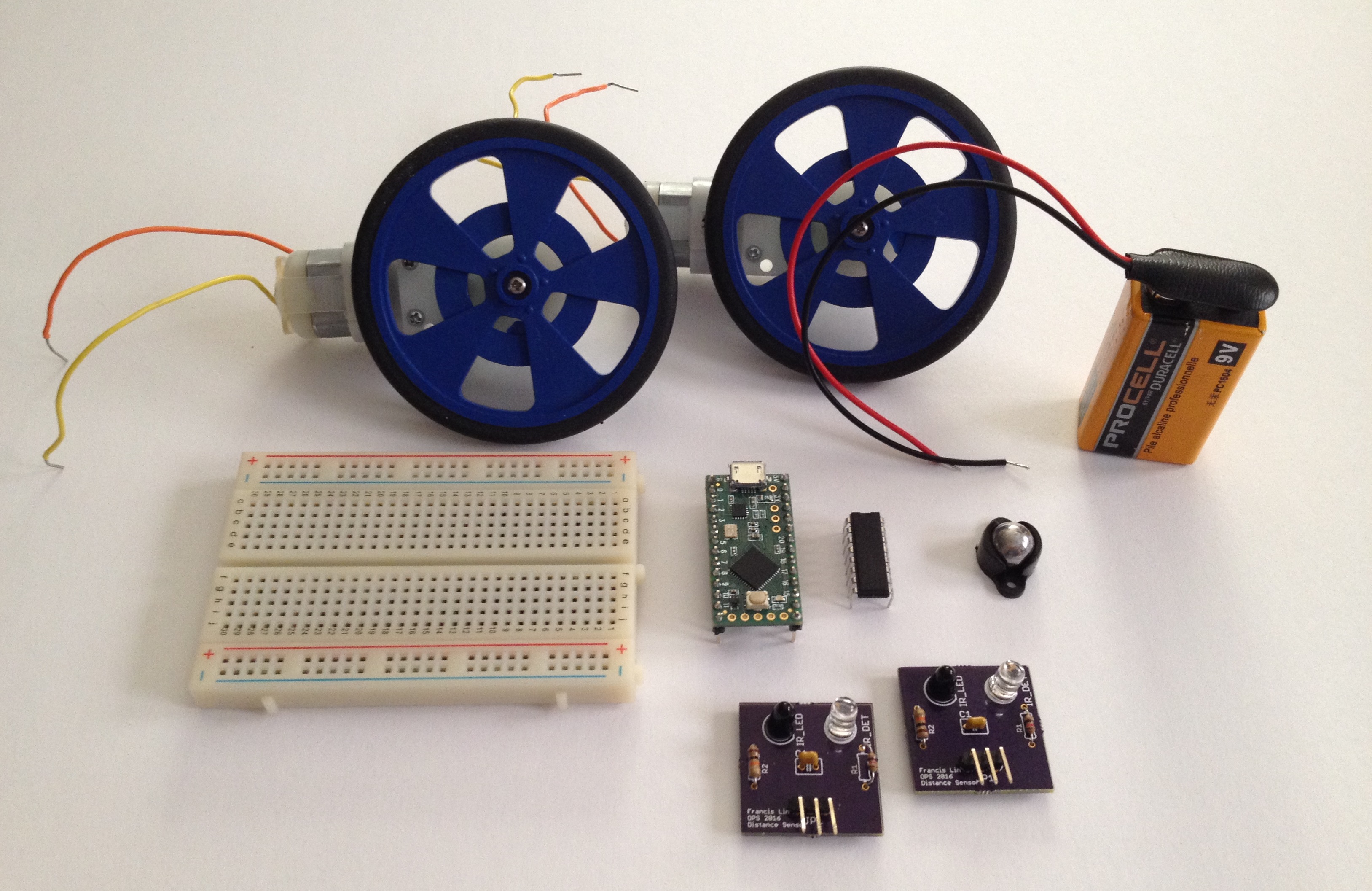
After the circuit was hooked up, a PID control was implemented on the Teensy-LC. After multiple trials, an optimized PID control was found. To finish off, I attached a 3.7V Li-po battery to power the microcontroller.